- SOFAR channel
-
The SOFAR channel (short for Sound Frequency and Ranging channel), or deep sound channel (DSC),[1] is a horizontal layer of water in the ocean at which depth the speed of sound is minimal. The SOFAR channel acts as a waveguide for sound, and low frequency sound waves within the channel may travel thousands of miles before dissipating.[2] This phenomenon is an important factor in submarine warfare. The deep sound channel was discovered and described independently by Dr. Maurice Ewing, and Leonid Brekhovskikh in the 1940s.[3]
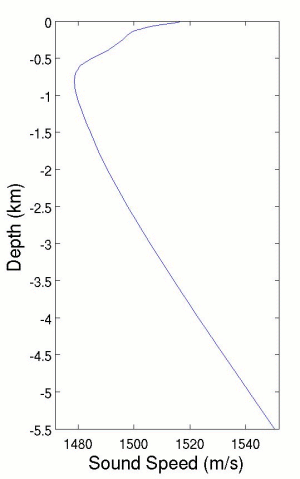
 Sound speed as a function of depth at a position north of Hawaii in the Pacific Ocean derived from the 2005 World Ocean Atlas. The SOFAR channel axis is at ca. 750-m depth.
Sound speed as a function of depth at a position north of Hawaii in the Pacific Ocean derived from the 2005 World Ocean Atlas. The SOFAR channel axis is at ca. 750-m depth.
The SOFAR channel is centered on the depth where the cumulative effect of temperature and water pressure (and, to a smaller extent, salinity) combine to create the region of minimum sound speed in the water column. Pressure in the ocean increases linearly with depth, but temperature is more variable, generally falling rapidly in the main thermocline from the surface to around a thousand meters deep, then remaining almost unchanged from there to the ocean floor in the deep sea. Near the surface, the rapidly falling temperature causes a decrease in sound speed, or a negative sound speed gradient. With increasing depth, the increasing pressure causes an increase in sound speed, or a positive sound speed gradient. The depth where the sound speed is at a minimum is called the sound channel axis.
Near Bermuda, the sound channel axis occurs at a depth of around 1000 meters. In temperate waters, the axis is shallower, and at high latitudes (above about 60°N or below 60°S) it reaches the surface.
Sound propagates in the channel by refraction of sound, which makes sound travel near the depth of slowest speed. If a sound wave propagates away from this horizontal channel, the part of the wave furthest from the channel axis travels faster, so the wave turns back toward the channel axis. As a result, the sound waves trace a path that oscillates across the SOFAR channel axis. This principle is similar to long distance transmission of light in an optical fiber.
Mysterious low-frequency sounds, attributed to humpback whales and other baleen whales, are a common occurrence in the channel. Scientists believe humpback whales may dive down to this channel and "sing" to communicate with other humpback whales many kilometers away.[4]
During World War II, Dr. Maurice Ewing suggested that dropping into the ocean a small metal sphere (called a SOFAR bomb or SOFAR disc), specifically designed to implode at the SOFAR channel, could be used as a secret distress signal by downed pilots.[5]
The novel The Hunt for Red October describes the use of the SOFAR channel in submarine detection.
The conjectured existence of a similar channel in the upper atmosphere, theorized by Dr. Ewing, led to Project Mogul, carried out from 1947 until late 1948.
 Acoustic pulses travel great distances in the ocean because they are trapped in an acoustic "wave guide". This means that as acoustic pulses approach the surface they are turned back towards the bottom, and as they approach the ocean bottom they are turned back towards the surface. The ocean conducts sound very efficiently, particularly sound at low frequencies, i.e., less than a few hundred Hz.
Acoustic pulses travel great distances in the ocean because they are trapped in an acoustic "wave guide". This means that as acoustic pulses approach the surface they are turned back towards the bottom, and as they approach the ocean bottom they are turned back towards the surface. The ocean conducts sound very efficiently, particularly sound at low frequencies, i.e., less than a few hundred Hz.Contents
Related terms
Terminology related to The SOFAR or deep sound channel from the United States' Navy Supplement to the DOD Dictionary of Military and Associated Terms:[1]
- bottom limited
- A situation that exists when the ocean bottom occurs at a depth less than the critical depth. Convergence zone propagation is prevented from occurring. Deep sound channel propagation is restricted to a deep source.
- conjugate depth
- For a source below the sonic layer depth, that depth below the deep sound channel axis where the sound speed equals the speed at the source depth.
- convergence zone
- That region in the deep ocean where sound rays, refracted from the depths, return to the surface. They are focused at or near the surface in successive intervals. A convergence zone is a sound-transmission channel in the deep ocean [2,500 to 15,000 feet (850 to 4,500 meters)] produced by the combination of pressure and temperature changes.
- cutoff frequency
- That frequency below which an acoustic signal will tend not to be trapped in a layer or duct and is a function of the depth of the layer.
- critical depth
- The depth below the deep sound channel (DSC) axis at which the sound speed is the same as it is at the sonic layer depth. The critical depth is the bottom of the DSC.
- deep layer
- In underwater acoustics, the layer of water between the lower edge of the main thermocline and the ocean bottom. It is characterized by a nearly constant temperature and a positive sound-speed gradient caused by pressure.
- depth excess (DE)
- In underwater acoustics, 1. The difference between the bottom depth and the depth at which the sound velocity is equal to either the surface velocity when there is no layer depth, or the maximum velocity in the surface layer. 2. The difference between the depth at which the maximum near-surface sound velocity recurs and the bottom depth. It is applied to convergence zone propagation.
- depth required
- In underwater acoustics, the minimum depth required for a reliable convergence zone to exist. It is 200 to 300 fathoms below the critical depth.
- diffraction loss
- The loss of sound energy that occurs when sound rays traveling in a sound channel experience leakage out of the channel and thus out of the main wave front.
- downslope enhancement
- Acoustic energy from a source in shallow water changes from a bottom bounce path to a convergence zone or sound channel path as it travels to deeper water and is concentrated down the slope to a receiver in deep water. Also called the megaphone effect. See upslope enhancement.
- half channel
- In underwater acoustics, an upward-refracting condition where the sound-speed gradient is positive from the surface all the way to the bottom. In a half channel, sound waves behave as if in a very thick surface duct.
- limiting depth
- In underwater acoustics, the depth below the deep sound channel axis where the sound speed equals the maximum near-surface sound speed.
- limiting ray
- In underwater acoustics, the sound ray that becomes tangent at the depth where the sound speed is at maximum; it delimits the outer boundary of direct (before reflection) sound rays.
- surface duct (SD)
- In underwater acoustics, a zone below the sea surface where sound rays are refracted toward the surface and then reflected. The rays alternately are refracted and reflected along the duct out to relatively long distances from the sound source.
- shadow zone
- In underwater acoustics, a region in which very little sound energy penetrates, depending upon the strength of the lower boundary of the surface duct. It is usually bounded by the lower boundary of the surface duct and the limiting ray. There are two shadow zones: the sea surface, beneath which a shadow is cast by the surface in the sound field of a shallow source, and the deep-sea bottom, which produces a shadow zone in the upward-refracting water above it.
- sonic layer depth (SLD)
- The depth of maximum near-surface sound speed above the deep sound channel.
- sound channel
- In underwater acoustics, that region in the water column where the sound speed first decreases to a minimum value with depth and then increases in value, due to pressure. Above the depth of minimum value, sound rays are bent downward; below the depth of minimum value, rays are bent upward, resulting in the rays being trapped in this channel and permitting their detection at great ranges from the sound source.
- sound channel axis
- The depth of minimum sound speed within a sound channel. Abbreviated as DSCA for the deep sound channel axis or SSCA for the secondary sound channel axis.
- topographic shading
- The disruption of convergence zone (CZ) or deep sound channel propagation by ocean bottom features such as seamounts, guyots, ridges, or islands. This disruption causes large shadow zones. Depth excess is destroyed for CZ propagation when a source is one-half the CZ range from such a bottom feature.
- upslope enhancement
- Acoustic energy from a source in deep water changes from a convergence zone or sound channel path to a bottom bounce path as the bottom shoals and is concentrated up the slope to a receiver in shallow water. Also known as the inverse megaphone effect.
- vertex depth
- In underwater acoustics, the depth in the water at which a refracted sound ray becomes horizontal.
See also
- Bathythermograph (BT)
- Ocean acoustic tomography
- Project Mogul
- SOSUS
- Thermocline
- Underwater acoustics
References
- ^ a b Navy Supplement to the DOD Dictionary of Military and Associated Terms. Department Of The Navy. August 2006. NTRP 1-02. https://www.nwdc.navy.mil/Documents/NTRP_1-02.pdf.
- ^ "The Heard Island Feasibility Test". Acoustical Society of America. 1994. http://scitation.aip.org/getabs/servlet/GetabsServlet?prog=normal&id=JASMAN000096000004002330000001&idtype=cvips&gifs=yes.
- ^ CITATION FOR LEONID MAXIMOVICH BREKHOVSKIKH ...for pioneering contributions to wave propagation and scattering
- ^ ORIENTATION BY MEANS OF LONG RANGE ACOUSTIC SIGNALING IN BALEEN WHALES, R. Payne, D. Webb, in Annals NY Acad. Sci., 188:110-41 (1971)
- ^ "Sound Channel, SOFAR, and SOSUS". Robert A. Muller. http://muller.lbl.gov/teaching/Physics10/old%20physics%2010/pages/SoundChannel.html. Retrieved 2007-04-14.
External links
- The SOFAR or deep sound channel, from NOAA
- A sound pipeline, from the National Academy of Sciences
- SOSUS, the "Secret Weapon" of Underwater Surveillance by Edward C. Whitman. Undersea Warfare
- Richard Muller, UC Berkeley-- lecture on waves, SOFAR and the Roswell UFO Incident
Sonar 
Ocean acoustics - Ocean acoustic tomography
- Sofar bomb
- SOFAR channel
- Underwater acoustics
Acoustic ecology Categories:



Wikimedia Foundation. 2010.